
१. गोलाकार बुनाई मेसिन प्रविधिको परिचय
१. गोलाकार बुनाई मेसिनको संक्षिप्त परिचय
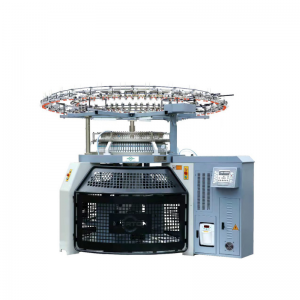
गोलाकार बुनाई बुनाई मेसिन (चित्र १ मा देखाइए अनुसार) एउटा उपकरण हो जसले सुती धागोलाई ट्युबुलर कपडामा बुन्छ। यो मुख्यतया विभिन्न प्रकारका उठेको बुनेको कपडा, टी-शर्ट कपडा, प्वाल भएका विभिन्न ढाँचाका कपडाहरू, आदि बुन्न प्रयोग गरिन्छ। संरचना अनुसार, यसलाई एकल जर्सी गोलाकार बुनाई मेसिन र डबल जर्सी गोलाकार बुनाई मेसिनमा विभाजन गर्न सकिन्छ, जुन कपडा उद्योगमा व्यापक रूपमा प्रयोग गरिन्छ।
 २. प्रक्रिया आवश्यकताहरू
२. प्रक्रिया आवश्यकताहरू
(१) इन्भर्टरमा बलियो वातावरणीय प्रतिरोध हुनु आवश्यक छ, किनभने साइटमा काम गर्ने वातावरणको तापक्रम तुलनात्मक रूपमा उच्च हुन्छ, र कपासको ऊनले सजिलैसँग कूलिंग फ्यानलाई रोकेर क्षति पुर्याउन सक्छ, र कूलिंग प्वालहरू अवरुद्ध हुन सक्छ।
(२) लचिलो इन्चिङ सञ्चालन प्रकार्य आवश्यक छ। उपकरणको धेरै ठाउँहरूमा इन्चिङ बटनहरू जडान गरिएका छन्, र इन्भर्टरले छिटो प्रतिक्रिया दिन आवश्यक छ।
(३) गति नियन्त्रणमा तीन गतिहरू आवश्यक हुन्छन्। एउटा इन्चिङ सञ्चालन गति हो, सामान्यतया ६ हर्ट्जको आसपास; अर्को सामान्य बुनाई गति हो, जसको उच्चतम आवृत्ति ७० हर्ट्जसम्म हुन्छ; तेस्रो कम-गतिको सङ्कलन सञ्चालन हो, जसको लागि लगभग २० हर्ट्जको आवृत्ति चाहिन्छ।
(४) गोलाकार बुनाई मेसिन सञ्चालन गर्दा, मोटर रिभर्सल र रोटेशन पूर्ण रूपमा निषेध गरिएको छ, अन्यथा सुईको ओछ्यानको सुईहरू बाङ्गिने वा भाँचिनेछन्। यदि गोलाकार बुनाई मेसिनले एकल-फेज बेयरिङ प्रयोग गर्छ भने, यसलाई विचार गरिने छैन। यदि प्रणाली अगाडि घुम्छ र उल्टो हुन्छ भने यो पूर्ण रूपमा मोटरको अगाडि र उल्टो रोटेशनमा निर्भर गर्दछ। एकातिर, यो रिभर्स रोटेशन निषेध गर्न सक्षम हुन आवश्यक छ, र अर्कोतर्फ, यसले रोटेशन हटाउन DC ब्रेकिङ सेट अप गर्न आवश्यक छ।
३. कार्यसम्पादन आवश्यकताहरू
बुनाई गर्दा, भार भारी हुन्छ, र इन्चिङ/सुरु गर्ने प्रक्रिया छिटो हुनुपर्छ, जसको लागि इन्भर्टरमा कम फ्रिक्वेन्सी, ठूलो टर्क र छिटो प्रतिक्रिया गति हुनु आवश्यक छ। फ्रिक्वेन्सी कन्भर्टरले मोटरको गति स्थिरीकरण शुद्धता र कम-फ्रिक्वेन्सी टर्क आउटपुट सुधार गर्न भेक्टर नियन्त्रण मोड अपनाउँछ।
४. नियन्त्रण तारिङ
गोलाकार बुनाई बुनाई मेसिनको नियन्त्रण भागले माइक्रोकन्ट्रोलर वा PLC + मानव-मेसिन इन्टरफेस नियन्त्रण अपनाउँछ। फ्रिक्वेन्सी कन्भर्टर सुरु र रोक्न टर्मिनलहरूद्वारा नियन्त्रित हुन्छ, र फ्रिक्वेन्सी एनालग मात्रा वा बहु-चरण फ्रिक्वेन्सी सेटिङद्वारा दिइन्छ।
बहु-गति नियन्त्रणको लागि मूलतः दुई नियन्त्रण योजनाहरू छन्। एउटा भनेको फ्रिक्वेन्सी सेट गर्न एनालग प्रयोग गर्नु हो। चाहे यो दौड होस् वा उच्च-गति र कम-गति सञ्चालन, एनालग सिग्नल र सञ्चालन निर्देशनहरू नियन्त्रण प्रणालीद्वारा दिइन्छ; अर्को भनेको फ्रिक्वेन्सी कन्भर्टर प्रयोग गर्नु हो। निर्मित बहु-चरण फ्रिक्वेन्सी सेटिङ, नियन्त्रण प्रणालीले बहु-चरण फ्रिक्वेन्सी स्विचिङ सिग्नल दिन्छ, दौड इन्भर्टर आफैंले प्रदान गर्दछ, र उच्च-गति बुनाई आवृत्ति एनालग मात्रा वा इन्भर्टरको डिजिटल सेटिङद्वारा दिइन्छ।
२. साइटमा आवश्यकताहरू र कमिसनिङ योजना
(१) साइटमा आवश्यकताहरू
गोलाकार बुनाई मेसिन उद्योगमा इन्भर्टरको नियन्त्रण कार्यको लागि अपेक्षाकृत सरल आवश्यकताहरू हुन्छन्। सामान्यतया, यो सुरु र रोक्न नियन्त्रण गर्न टर्मिनलहरूमा जडान गरिन्छ, एनालग फ्रिक्वेन्सी दिइन्छ, वा फ्रिक्वेन्सी सेट गर्न बहु-गति प्रयोग गरिन्छ। इन्चिङ वा कम-गति सञ्चालन छिटो हुनु आवश्यक छ, त्यसैले इन्भर्टरले कम फ्रिक्वेन्सीमा ठूलो कम-फ्रिक्वेन्सी टर्क उत्पन्न गर्न मोटरलाई नियन्त्रण गर्न आवश्यक छ। सामान्यतया, गोलाकार बुनाई मेसिनहरूको प्रयोगमा, फ्रिक्वेन्सी कन्भर्टरको V/F मोड पर्याप्त हुन्छ।
(२) डिबगिङ योजना हामीले अपनाउने योजना यस प्रकार छ: C320 श्रृंखला सेन्सरलेस करेन्ट भेक्टर इन्भर्टर पावर: ३.७ र ५.५ किलोवाट
३. डिबगिङ प्यारामिटरहरू र निर्देशनहरू
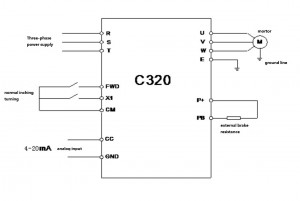
१. तार रेखाचित्र
२. डिबग प्यारामिटर सेटिङ
(१) F0.0=0 VF मोड
(२) F0.1=6 फ्रिक्वेन्सी इनपुट च्यानल बाह्य वर्तमान संकेत
(३) F0.4=0001 बाह्य टर्मिनल नियन्त्रण
(४) F0.6=0010 रिभर्स रोटेशन रोकथाम मान्य छ
(५) F०.१०=५ त्वरण समय ५S
(६) F0.11=0.8 गति घटाउने समय 0.8S
(७) F0.16=६ वाहक आवृत्ति ६K
(८) F1.1=४ टर्क बूस्ट ४
(९) F3.0=6 फर्वार्ड जोगमा X1 सेट गर्नुहोस्
(१०) F४.१०=६ जोग फ्रिक्वेन्सी ६HZ मा सेट गर्नुहोस्
(११) F4.21=3.5 दौडको गति बढाउने समय ३.५ सेकेन्डमा सेट गर्नुहोस्।
(१२) F4.22=१.५ ले जोग डिसेलेरेसन समय १.५ सेकेन्डमा सेट गर्छ।
डिबगिङ नोटहरू
(१) पहिले, मोटरको दिशा निर्धारण गर्न दौडनुहोस्।
(२) दौडने क्रममा कम्पन र ढिलो प्रतिक्रियाको समस्याको सन्दर्भमा, दौडने गति र ढिलाइ समय आवश्यकता अनुसार समायोजन गर्न आवश्यक छ।
(३) कम आवृत्ति टर्कलाई वाहक तरंग र टर्क बूस्ट समायोजन गरेर सुधार गर्न सकिन्छ।
(४) कपासको ऊनले हावाको नलीलाई रोक्छ र पंखा बन्द हुन्छ, जसले गर्दा इन्भर्टरको तापक्रम कम हुन्छ। यो अवस्था बारम्बार हुन्छ। हाल, सामान्य इन्भर्टरले थर्मल अलार्म छोड्छ र त्यसपछि यसलाई प्रयोग गर्न जारी राख्नु अघि हावाको नलीमा रहेको लिन्टलाई म्यानुअल रूपमा हटाउँछ।
पोस्ट समय: सेप्टेम्बर-०८-२०२३